机器学习概述笔记
本文最后更新于:几秒前
《神经网络与机器学习》第二章笔记
概述
机器学习的三要素
模型、学习准则、优化
线性回归
模型:$f(\boldsymbol{x} ; \boldsymbol{w},b)=\boldsymbol{w}^{\top} \boldsymbol{x}+b$,使用增广矩阵表示
概率基础
伯努利分布
在一次试验中,事件A出现的概率为$µ$,不出现的概率为$1 − µ$。若用变量X表示事件A出现的次数,则X的取值为0和1,其相应的分布为
$$
P(X)=μ^{X}(1-μ)^{1-X}
$$
二项分布
在n次伯努利分布中,若以变量X表示事件A出现的次数,则X 的取值为{0,… ,n}
$$
P(x=k)=C^k_ nμ^{k}(1-μ)^{1-k}
$$
累计随机变量(CDF)
$$
cdf(x) = \begin{cases}
P(X \le x) & \text{if X是离散随机变量} \\[2ex]
\int^x_ {-\infty} & \text{if X是连续变量} \\
\end{cases}
$$
条件概率
对于离散随机向量$(X,Y)$,已知$X = x$的条件下,随机变量$Y = y$的条件概率为:
$$
p(y|x) = P(Y=y|X=x) = {p(x,y) \over p(x)}
$$
贝叶斯公式
两个条件概率 $p(y|x)$ 和 $p(x|y)$ 之间的关系
$$
p(y|x)={p(x|y)p(y) \over p(x)}
$$
期望
随机变量的均值
$$
\mathbb E[X] =
\begin{cases}
\sum^N_ {n=1}{x_ np(x_ n)} \\[2em]
\int_\mathbb R xp(x) dx
\end{cases}
$$
大数定律
当样本足够大时,样本的均值将无限接近于分布期望
最大似然与最大后验
根据贝叶斯公式$p(w|x) = {p(x|w)p(w) \over p(x)}$得
$$
p(w|x) \propto p(x|w)p(w)
$$
其中,我们称$p(x|w)$是基于先验的似然函数,$p(w)$是先验,$p(w|x)$是后验函数,即:
$$
后验(posterior) \propto 似然(likelihood) \times 先验(prior)
$$
似然函数是关于统计模型$p(x;w)$的参数w的函数,和概率$p(x;w)$的表示方法一致,但看待角度不同,概率$p(x;w)$是描述固定参数$w$后,随机变量$x$的分布情况,是对$x$的看待角度;似然$p(x;w)$则是描述已知随机变量$x$时,不同参数$w$对分布产生的影响,是对$w$的看法。
一般我们看到的是这样的表示形式
$$
p(w|X,y;\nu,\sigma) \propto p(y|X,w;\sigma) \times p(w,\nu), (2.1)
$$
最大似然估计是找到一组参数$w$使得似然函数$p(y|X,w;\sigma)$最大,即
$$
MLE=\arg\max_w\ p(y|X,w;\sigma)=\arg\max_w\ log(p(y|X,w;\sigma))
$$
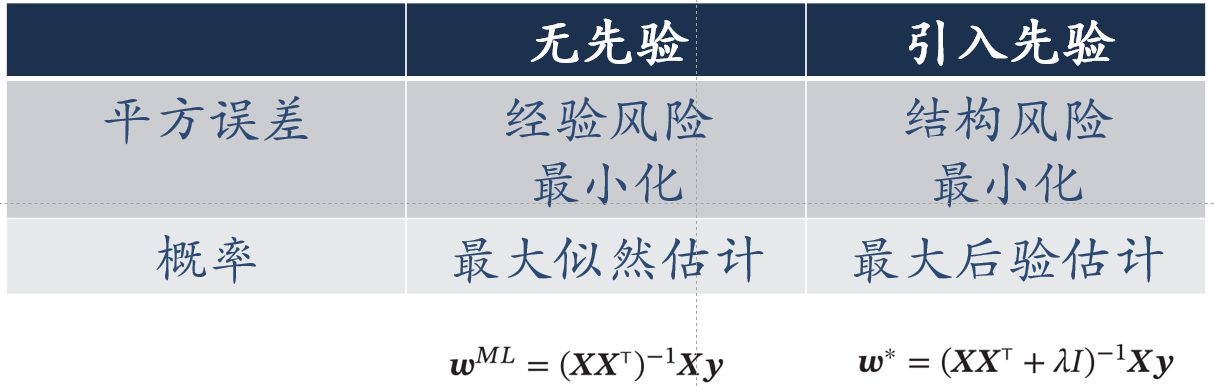
令${\partial logp(y|X,w;\sigma) \over \partial w} = 0$,可得$w^{ML}=(XX^\top)^{-1}Xy$(计算略)。
后验是对似然与先验的综合考量,更多的,最大后验估计是找到一组$w$使得后验函数$p(w|X,y;\nu,\sigma)$最大,即有
$$
MAP=\arg\max_w\ p(w|X,y;\nu,\sigma)
\propto \arg\max_w\ p(y|X,w;\sigma) \times p(w,\nu) \\
= \arg\max_w\ log(p(y|X,w;\sigma) \times p(w,\nu))
= \arg\max_w\ log(p(y|X,w;\sigma))+ \arg\max_w\ p(w,\nu)\\
= MLE+||w||
$$
可知,MAP就是在MLE的基础上加入了正则化惩罚项。更多的,我们可以得出以下表格(计算略)
几个关键点
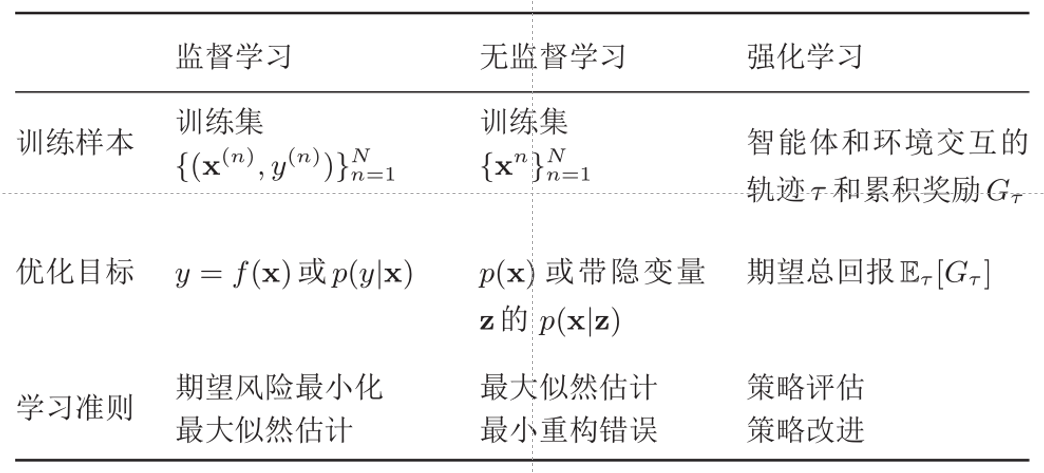
常见的机器学习类型包括监督学习、无监督学习与强化学习三种
模型选择问题——验证集
引入验证集,将训练集按照7:3或者8:2的比例分成训练集和验证集,其中验证集用于选择在验证集上表现最好的模型。
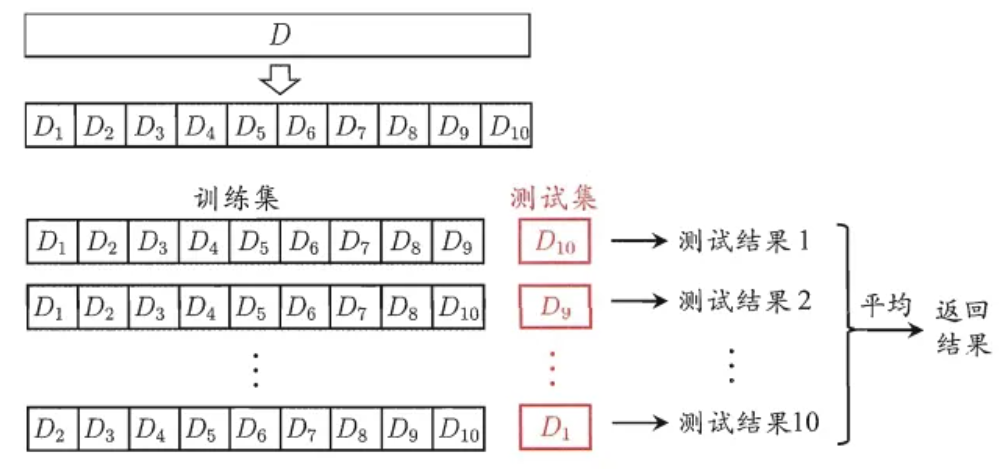
数据稀疏问题——交叉验证
将训练集分成S组,每次使用S-1组作为训练集,剩下的一组作为验证集,选择在验证集上平均性能最好的一组。
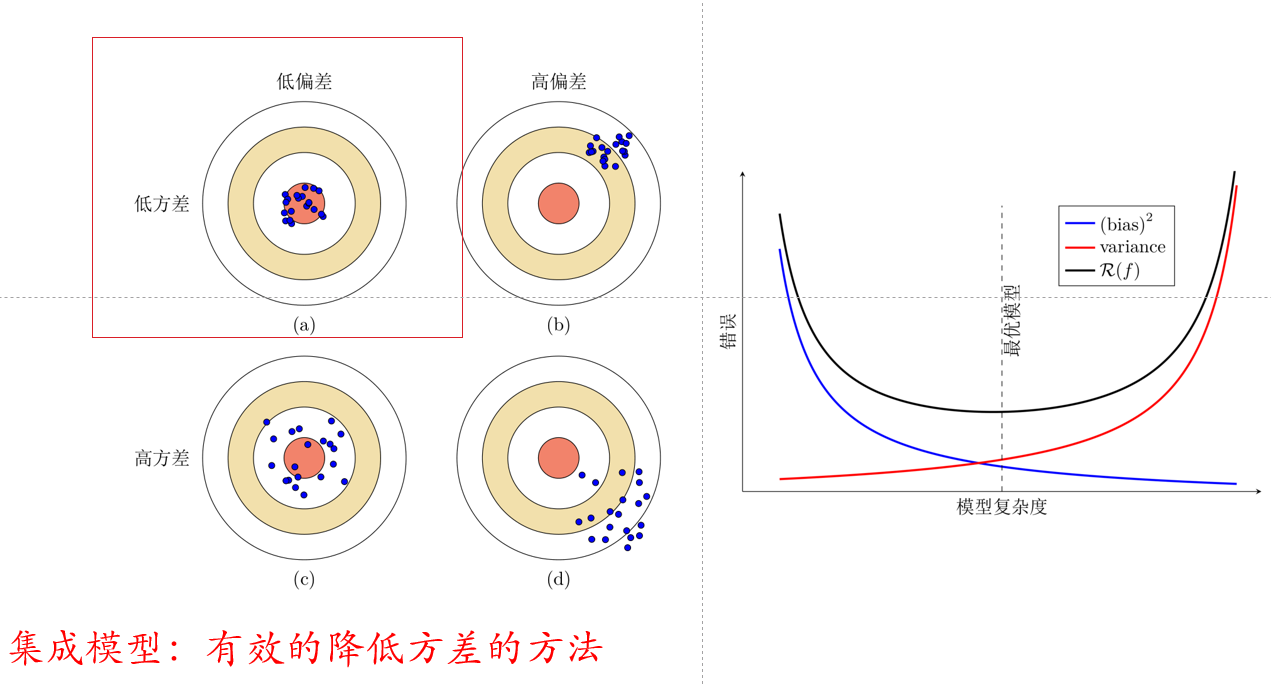
期望风险中的偏差与方差求解
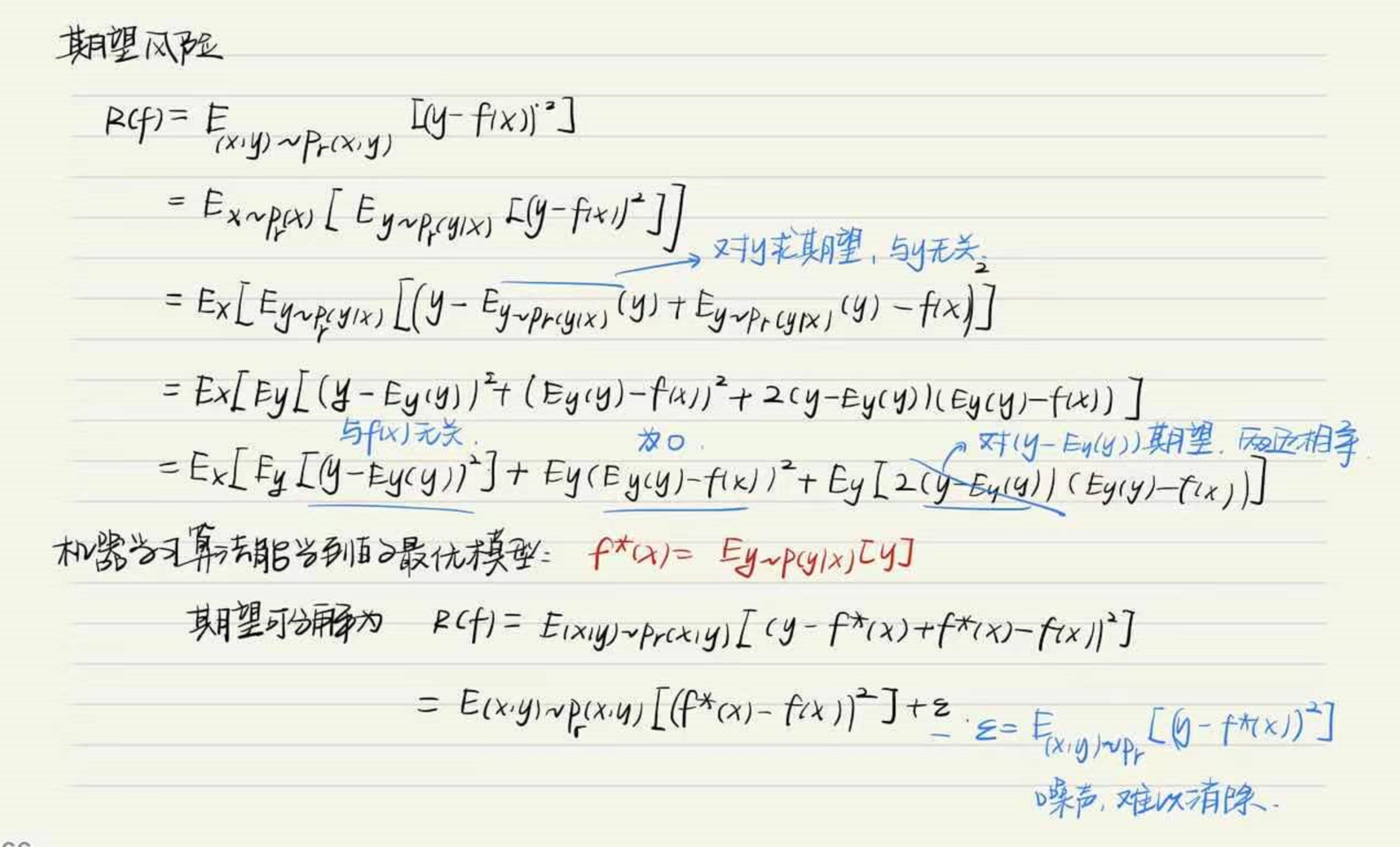
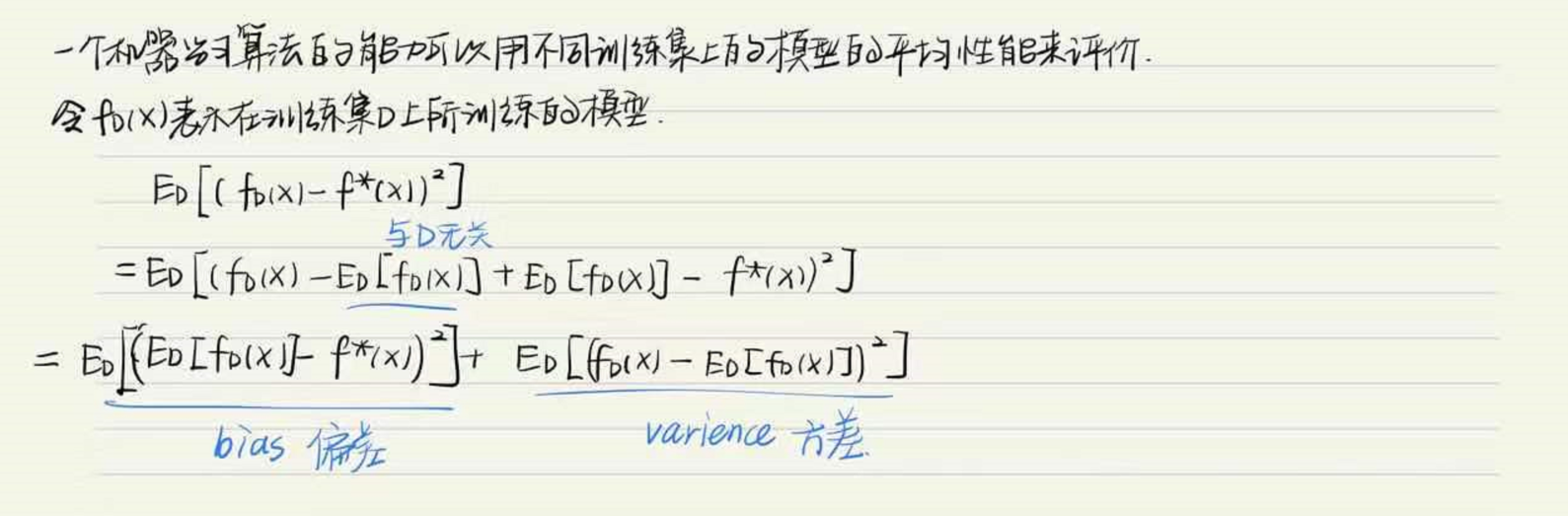
偏差与方差都是在模型中需要去考虑和中和的点。
PAC学习
根据大数定律,当训练集大小$|D|$趋向无穷大时,泛化错误趋向于0,即经验风险趋近于期望风险。
PAC学习的表达式如下:
$$
P((\mathcal R(\mathcal f) - \mathcal R^{emp}_\mathcal D(f)) \le \epsilon) \ge 1-\delta
$$
其中,$(\mathcal R(\mathcal f) - \mathcal R^{emp}_\mathcal D(f)) \le \epsilon$表示经验误差与结构误差需近似正确,$\epsilon \in (0,0.5)$;$P(…)\ge 1 - \delta $ 表示可能性,$\delta \in (0,0.5)$。如果固定$\epsilon和\delta$,可以反过来计算出样本的复杂度为(计算略)
$$
n(\epsilon,\delta) \ge {1 \over 2\epsilon^2}(ln|\mathcal F|+ln{2\over\delta})
$$
公式表明,如果希望模型的假设空间$|\mathcal F|$越大,泛化误差越小,那么其需要的样本数量$n$也就越多。
常见定理
天下没有午餐定理
对于基于迭代的最优化算法,不存在某种算法对所有问题(有限的搜索空间内)都有效。如果一个算法对某些问题有效,那么它一定在另外一些问题上比纯随机搜索算法更差。
丑小鸭定理
丑小鸭与白天鹅之间的区别和两只白天鹅之间的区别一样大,即特征差别一样大。比较时需要确定比较标准。
奥卡姆剃刀原理
在效力相同情况下,简单的模型要优于更为复杂的模型
归纳偏置
很多学习算法经常会对学习的问题做一些假设,这些假设就称为归纳偏置,归纳偏置在贝叶斯学习中也经常称为先验(Prior)。
索引->B树